慣性モーメント
平行軸の定理
今までは,”物体の重心を通る軸上の回転の慣性モーメント”を求めていきましたが,
回転軸と物体の重心が一致しない場合
はどのように考えていけばいいのでしょう?
これは,平行軸の定理,と呼ばれていて,色々なサイトで説明がなされていますが,Wiki,が一番わかりやすかったです.
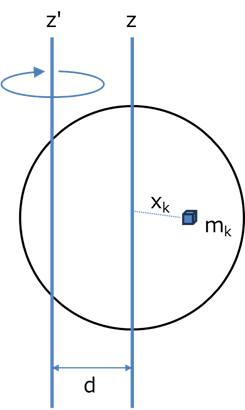
図のように,重心から,d,だけズレた軸が回転軸の場合を考えます.
三次元物体の場合,慣性モーメントは,重心位置となる回転軸,z(=z'+d),の場合,
\( \Large \displaystyle J_{center} = \int (x^2 + y^2 ) \ dM \)
となりますが,回転軸がdだけずれたz‘の場合は,x方向にdだけずれている物体の座標は,x+d,となるので,
\( \Large \displaystyle J = \int \left[ (x+d)^2 + y^2 \right] \ dM \)
\( \Large \displaystyle = \int \left[ x^2+ 2dx +d^2 + y^2 \right] \ dM \)
\( \Large \displaystyle = \int ( x^2+ y^2) \ dM + 2d \int x \ dM +d^2 \int x \ dM \)
となりますが,第二項は重心の定義により,0となります.したがって,
\( \Large \displaystyle =J_{center} +Md^2 \)
となり,重心を通る場合の慣性モーメント + 回転軸と重心との距離の二乗の積,と簡単な計算となります.
次ページからは,平行軸の定理の検証,を検討していきます.
![]()
![]()
![]()